Micromotor Product Site
Exporting to Europe, USA, and Asia.
Dealers available in North America, Europe, and Asia.

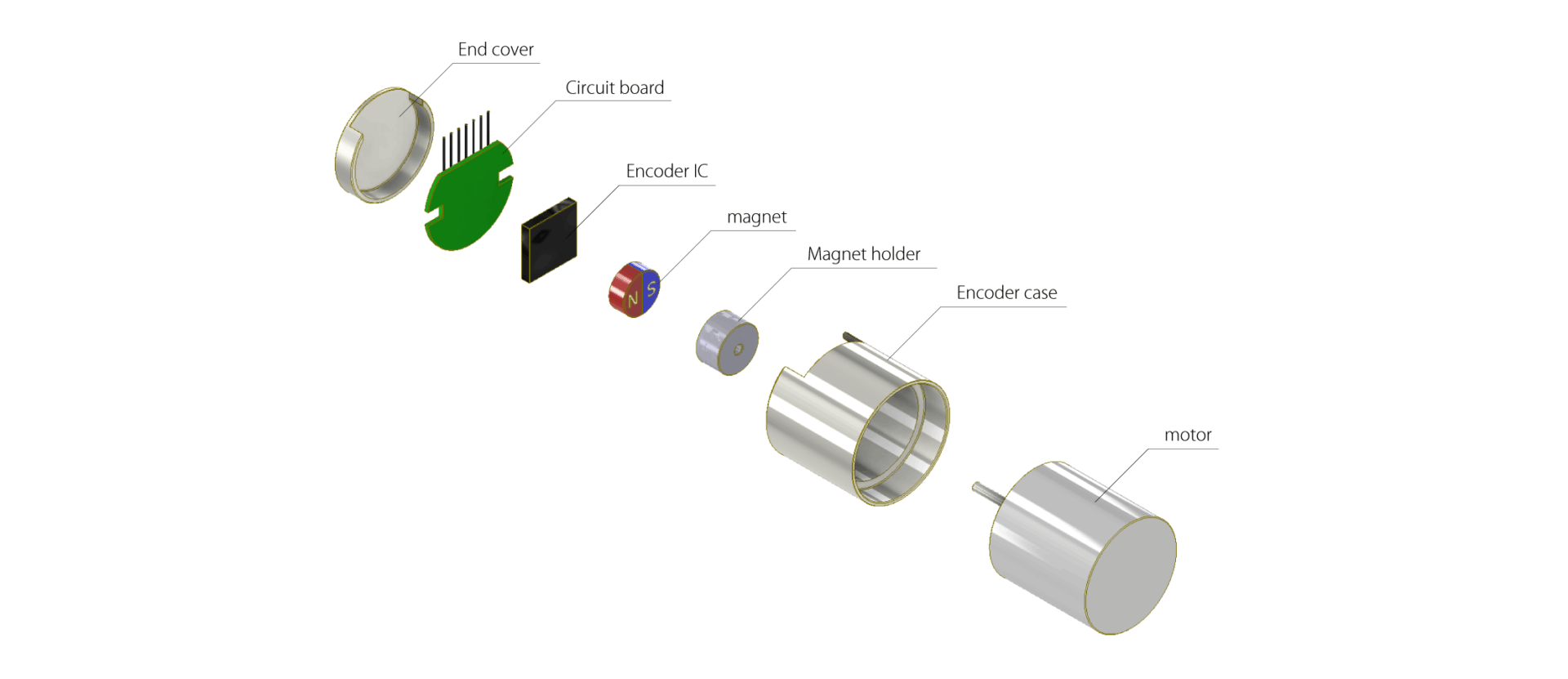
The encoder (rotary encoder) is a device that detects the rotation direction and angle using sensors and outputs the detected position information as an electrical signal.
There are two types of sensor detection methods: optical and magnetic. There are also two types of output methods: incremental and absolute.
C.I. TAKIRON encoders can be mounted on motors with outer diameters of 12, 16, and 22 mm.
A permanent magnet is attached to the motor shaft, and a sensor detects changes in the magnetic field created by the permanent magnet.
By detecting the magnetic field that changes as the shaft rotates, the amount of rotation can be recognized.
C.I. TAKIRON's rotary encoders use this magnetic encoder.
Because it detects changes in the magnetic field, it is highly resistant to contamination from oil, water, dust, and other substances in the surrounding environment, and is characterized by its high reliability.
In addition, it has fewer parts than the optical encoders described below, making it compact and lightweight.
A rotating disk with radial slits is attached to the motor shaft, and the light passing through the slits is detected by a sensor.
The rotation amount can be determined based on the number of detected pulses.
The resolution can be set based on the number of slits, and a key feature is that it is not affected by surrounding magnetic fields.
Among optical encoders, there are two types: light transmission type and light reflection type encoders. In the more common light transmission type encoder,
increasing the size of the disk and reducing the size of the slits improves resolution, so this type is often used in motors with larger diameters.
In the example of a magnetic encoder, the encoder outputs rectangular or sine waves from phase A and phase B, which is shifted by an electrical angle of 90°.
From the waveforms of the A phase and B phase, it is possible to detect the rotation direction, movement amount, and rotation speed.
However, this alone is not sufficient to detect the origin. Therefore, by setting a Z phase to output the origin, it becomes possible to detect the origin.
Taking a resolution of 10 bits as an example, 10 bits is 2 to the power of 10, which means that 1024 patterns can be assigned to one rotation.
In other words, it is possible to detect the amount of rotation at 360°/1024 = 0.351° intervals.
C.I. TAKIRON's absolute magnetic encoders can be set in a range of 10 to 18 bits.
The communication method is serial communication, which outputs signals.
Additionally, at the time of shipment, it is possible to switch between absolute mode and incremental mode using the same magnetic encoder.
1~10,000CPR
10~18 bit
(There are no related application examples.)
At this time, there is no corresponding track record.
Delivery is expected to take 3 months due to the time required to order parts for customization, but delivery can be made within 1 month depending on the parts inventory and manufacturing schedule.
The proven track record is to operate in ambient temperatures ranging from -40°C to +60°C, but it depends on the model.
It can be mounted using the outside diameter of the motor or secured using the motor mounting surface.
Support can be provided by phone or email. We may also be able to provide on-site support, depending on the nature of your consultation.
Our production sites are located in Japan and China.
European chemical regulations such as REACH and RoHS directives for motor products are complied with upon customer request.
Our main manufacturing base, Shanghai Kiai Chemical & Electronics Co., Ltd. has acquired ISO 9001 and ISO 14001 certification. No other manufacturing bases have obtained these certifications.
| NO IMAGE | Model Name | Outer Diameter | Length | Applied Voltage | No Load | Startup | Max | Product Details ▶ | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Rotation Speed | Current | Current | Torque | Efficiency | Output | |||||||
| Encoder (Under development) | - | - | - | - | - | - | - | - | - | |||
| Customizable Items | - | |||||||||||






