
エンコーダ(ロータリーエンコーダ)は回転方向、角度をセンサーで検出、検出した位置情報を電気信号として出力する装置になります。
センサーの検出方法は光学式と磁気式の2種類があり、出力方式はインクリメンタル型とアブソリュート型があります。
タキロンシーアイではモータ外径φ12、φ16、φ22のサイズに取り付けが可能です。
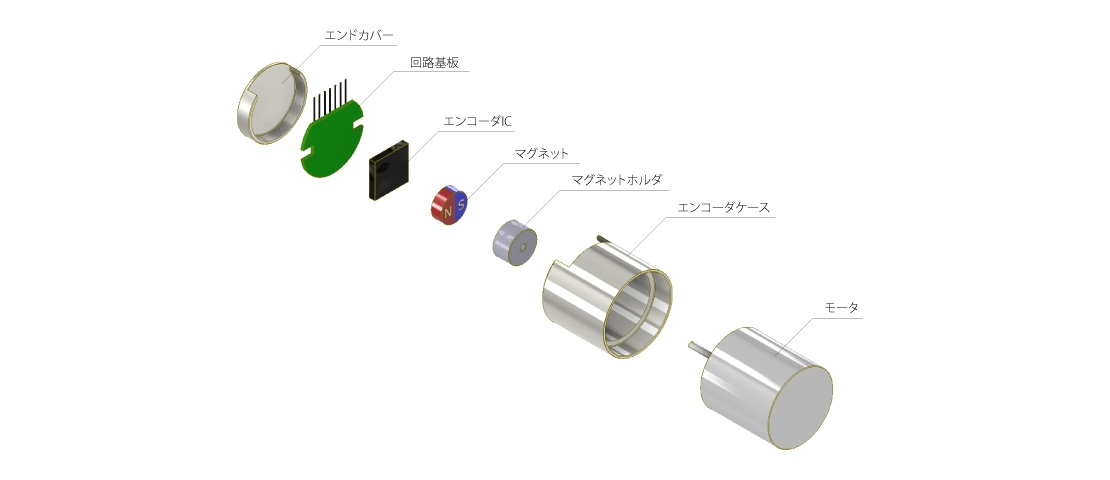
モータ軸に永久磁石を取り付け、永久磁石が作り出している磁界の変化をセンサーによって検出する方式になります。
回転することによって変化する磁界を検出することにより軸の回転量を認識することができます。
タキロンシーアイのロータリエンコーダはこちらの磁気式エンコーダを採用しております。
磁界の変化を検出するため、周囲の油、水、埃などの汚れに強く耐環境性に優れており、高い信頼性を得ることができることが特徴になります。
また、後述する光学式エンコーダと比較して部品点数が少ないため、小型軽量化を実現できます。
モータ軸に放射状のスリットを空けた回転円盤を取り付け、スリットを通過する光をセンサーによって検出する方式になります。
検出したパルス数によって回転量を認識することができます。
分解能はスリット数によって決めることができ、周囲の磁界の影響を受けないことが特徴になります。
光学式エンコーダの中でも光透過方式と光反射方式エンコーダが存在します。より一般的な光透過方式のエンコーダでは
円盤を大きくし、スリットを小さくする方が分解能を高められるため比較的大径のモータに採用される傾向があります。
磁気式エンコーダを例にすると、エンコーダの出力はA相と電気角90°ずらしたB相から矩形波または正弦波が出力されます。
A相、B相の波形より回転方向、移動量、回転数を検出することが可能になります。
ただしこれだけでは原点を検出することができません。そのため新たに原点を出すためにZ相を設定することで、原点の検出が可能となります。
分解能10bitを例にすると10bitは2の10乗となりますので、1024通りのパターンを1回転に割り振ることになります。
つまり360°/1024=0.351°毎に回転量を検出することが可能となります。
タキロンシーアイのアブソリュート型磁気式エンコーダは10~18bitの範囲で設定可能です。
通信方式はシリアル通信で信号を出力する方式になります。
また、出荷時に同じ磁気式エンコーダでアブソリュート方式とインクリメンタル方式を切り替えることが可能となっております。
1~10,000CPR
10~18bit
(関連する用途事例はありません。)
現時点では対応実績はありません。
カスタム対応のため部品発注に時間が掛かるため納期は3か月を見込んでいますが、部品在庫や製造スケジュール次第では1か月以内に納入可能です。
モータ外径を使用した取付やモータ取付面を使用した固定などに対応しております。
電話やメールでのサポートが可能です。また、ご相談内容により、現地でのサポートを提供するこができる場合もあります。
当社の生産拠点は日本国内および中国です。
モータ製品の欧州の化学品規制REACHやRoHS指令などは、お客様の要望に応じて対応しております。
主要製造拠点の上海希愛化成電子有限公司はISO9001とISO14001を取得しています。他の拠点では取得していません。
NO IMAGE | 機種名 | 外径 | 長さ | 印加電圧 | 無負荷 | 起動 | 最大 | 製品詳細 ▶ | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 回転数 | 電流 | 電流 | トルク | 効率 | 出力 | |||||||
| エンコーダ | - | - | - | - | - | - | - | - | - | |||
| 対応可能項目 | - | |||||||||||






